



Lupine Publishers Group
Lupine Publishers
ISSN: 2690-5779
Review Article(ISSN: 2690-5779) 
A note on the Burger’s method Volume 1 - Issue 3
Received: November 30,2020 Published: February 10, 2021
Corresponding author: Doo-Sung Lee, Department of Mathematics College of Education, Konkuk University Seoul, Korea
DOI: 10.32474/JOMME.2021.01.000116
Abstract
The existence and uniqueness of the solutions to an infinite system of nonlinear equations arising in thedynamic analysis of large deflection of a plate are discussed. Under the assumption that the rim of the plate is prevented from inplane motions, explicit equation for the coupling parameter is given.
Keywords: Existence, uniqueness, Berger’s method.1991 Mathematics Subject Classification. 46(Functional analysis),73(Mechanics of solids)
Introduction
In the analysis of classical mechanics problems, there are
cases where linear mathematical model can not fully describe the
phenomena. If the deflection of the plate is of order of magnitude
of its thickness, the differential equations for the deflection and
displacements can be written in terms of nonlinear equations. These
nonlinear equations are usually difficult to obtain the solution. Thus
several attempts have been tried to obviate the difficulties.
Among these attempts, it was Berger’s method which drew
much attention.
Berger[1] derived a simplified nonlinear equations for a plate
with large deflections by assuming that the strain energy due to the
second invariants of the middle surface strains can be neglected
when deriving the differential equations by energy method. Berger
restricted his analysis to static and isotropic cases. Later, his
procedure was generalized to dynamics of isotropic plates by Nash
and Modeer [2] and to dynamic phenomena in anisotropic plates
and shallow shells by Nowinski [3]. Berger’methods is dealt in
recent books [5, 6].
There many are papers giving explicit solutions to various
cases, however the search for the existence and uniqueness of the
solution is rare, thus it is the purpose of this paper to discuss this
matter.
The governing equations are
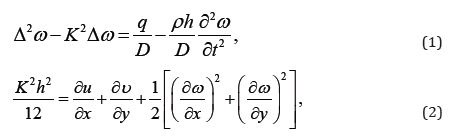
where w = deflectiom of plate in the normal direction. u, v =displacement in plane of plate.
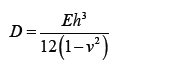
E = modulus of elasticity.
The coupling parameter is now determined from the equation
(2) as follows, under the assumption that the rim of the plate is
prevented from inplane motions

We attempt to find Fourier series solutions to (1) when q = 0 and the plate is simply supported.

When this solution is substituted in (1) and (3) we find
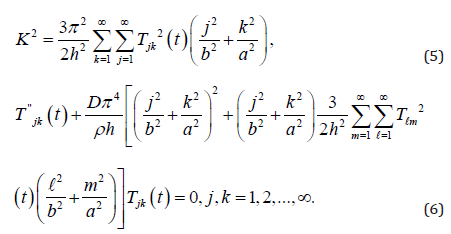
We discuss the existence and uniqueness of the solutions to above infinite system of nonlinear equations. The initial conditions on (6) will be taken as

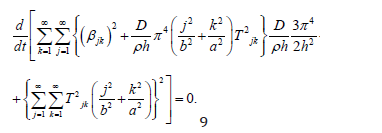
If we multiply (6) by T’ jk and sum j, k from 1 to infinity, we can show that
At first glance it would appear that if the initial conditions (7)
and (8) satisfy a finite energy
condition, i.e.,
then (6) should have a solution for all t > 0. Indeed this is the case for finite system of the form
(6) since the finite system
has associated with it a Lipschitz constant. Therefore, successive approximation method may be applied to prove the existence of solution to (11). However, the infinite system of equations (6) is not Lipschitz continuous since the coefficients of Tjk is unbounded as j, k → ∞. Thus the method of successive approximation fails and an alternative procedure is necessary.
In section 2, it will be shown that under the initial conditions (7) and (8) solution of the finite system (11) converge to a solution (6) as L, M → ∞. In section 3 it will be shown that the solution of (6) satisfying initial conditions (7) and (8) is unique.
Existence
To prove solution existence of (6), we define a set of functions Tjk,LM in the following way: For j, k ≤ L, M, Tjk,LM is a solution of the finite system of equations (11) satisfying the initial conditions (7) and (8) for j = 1, 2, · · · , M and k = 1, 2, · · · , L and for j > L, k > M set Tjk,LM = 0. The functions Tjk,LM are solutions of the infinite system (6),i.e.
If in addition the initial data (7) and (8) satisfy the finite energy condition (10) it follows that
Thus there exist constants M1, M2 and M3 independent of L, M
Lemma 1. |A’LM| is uniformly bounded independent of L, M
where prime indicates differentiation with respect to t.
Proof. After differentiating the function ALM, if we employ
Schwarz inequality we obtain
in view of the relations (15) and (16).
Lemma 2. |ALM| is uniformly bounded independent of L, M
Proof. |ALM | is uniformly bounded independent of L, M from
the relation (17).
Thus ALM is uniformly bounded and equicontinuous; by
Arzela’s lemma, there exists a subsequence {ALM,i} which
converges uniformly to a continuous function A(t). Let Tjk be the
solution of the(linear) equation

satisfying the initial conditions (7) and (8). The existence of solutions to (6) is settled by the
following theorem.
Theorem 1. The infinite system of (6) have a solution satisfying the initial data (7) and (8). Proof. It is only necessary to show that the solutions of linear system (19) furnish a solution of system (6). For this purpose it suffices to show that

The series which occurs in (20) converges since(cf.(17))

The equality in (20) follows from the estimate
The right side of (22) can be made arbitrarily small by first choosing L, M, then choosing Li, Mi.
Uniqueness
In this section it will be shown that the infinite system (6) has at most one solution satisfying the initial conditions (7) and (8). We write (6) in the following way.
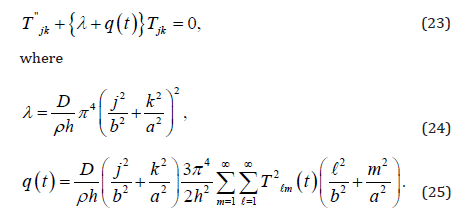
Let Tjk and Sjk be solutions of (6) satisfying the initial conditions (7) and (8) i.e. Tjk is the solution of (23) with q(t) being given by (25) and Sjk is the solution of
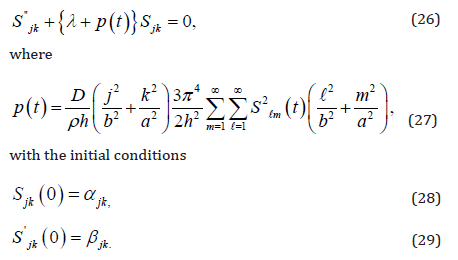
If we multiply (23) by Sjk and from the resulting equation, we substract (26) multiplied by Tjk and integrate it from zero to infinity, we get, after integrating by parts

where we have used the initial conditions (7),(8),(28),(29). According to Gel’fand and Levitan[4] there exists function K(t, x) having continuous partial derivatives of first and second order such that

If we substitute (31) into (23),we find that the partial differential equation

and the boundary conditions

are satisfied. Similarly,
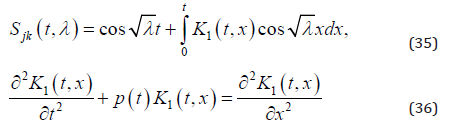
and the boundary conditions
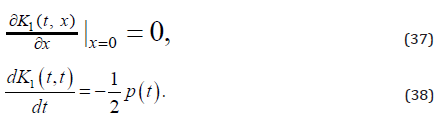
Thus if we substitute (31) and (35) into (30), we find that
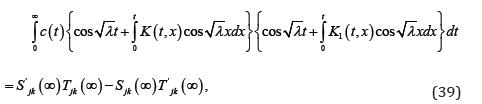
where c(t) = q(t) − p(t). Making change of variables and changing the order of integration in (39) we get
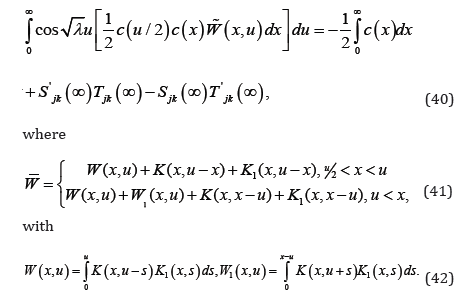
The left hand side of (40) is a function of λ,whereas right hand side is a constant. The equality holds only when both sides are equal to zero. Thus

and from Gronwall’s Lemma we get c(t) = 0, i.e.,

Let Uj = Kj − Sj . We show Uj = 0 in the following. From (23) and (26) we have

because of (44). Let us denote

Then Vjk(t) will be the solution of
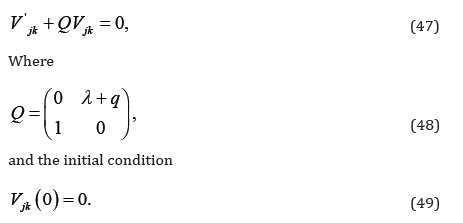
With the initial condition (49), the solution of (47) is Vjk = 0
from the semi-group theory. So we have the following theorem.
Theorem 2.The system of equations (6) have at most one
solution satisfying the initial conditions (7) and (8).
References
- HM Berger (1954) A new approach to the analysis of large deflections of plates, JApplMech. 22(1955): 465-472.
- WANash and JR Modeer (1960) Certain approximate analyses of non-linear behavior of plates and shallow shells, ProcSymp, ThThin ElShells, Interscience, New York, USA.
- JLNowinski (1975) Some static and dynamic problems concerning non-linear behavior of plates and shallow shells with discontinuous boundary conditions. IntJNon-Linear Mechanics 10(1): 1-14
- IM Gel’fand and BM Levitan (1955) On the determination of a differential equation from its spectral function. Amer MathSocTrans Ser 15(4): 253-304
- ARoy and RKBera (2019) Linear and nonlinear deformations of elastic solids. CRC press, Taylor & Francis Group.
- FBloom and DCoffin (2000) Handbook of Thin Plate Buckling and Postbuckling, Chapman & Hall/CRC New York, USA.


-

Mark E Smith
Bio chemistry
University of Texas Medical Branch, USA -

Lawrence A Presley
Department of Criminal Justice
Liberty University, USA -

Thomas W Miller
Department of Psychiatry
University of Kentucky, USA -

Gjumrakch Aliev
Department of Medicine
Gally International Biomedical Research & Consulting LLC, USA -

Christopher Bryant
Department of Urbanisation and Agricultural
Montreal university, USA -

Robert William Frare
Oral & Maxillofacial Pathology
New York University, USA -

Rudolph Modesto Navari
Gastroenterology and Hepatology
University of Alabama, UK -

Andrew Hague
Department of Medicine
Universities of Bradford, UK -

George Gregory Buttigieg
Maltese College of Obstetrics and Gynaecology, Europe -

Chen-Hsiung Yeh
Oncology
Circulogene Theranostics, England -
.png)
Emilio Bucio-Carrillo
Radiation Chemistry
National University of Mexico, USA -
.jpg)
Casey J Grenier
Analytical Chemistry
Wentworth Institute of Technology, USA -

Hany Atalah
Minimally Invasive Surgery
Mercer University school of Medicine, USA -

Abu-Hussein Muhamad
Pediatric Dentistry
University of Athens , Greece
