




Lupine Publishers Group
Lupine Publishers
ISSN: 2644-1381
Mini Review(ISSN: 2644-1381) 
On some Derivatives of Vector-Matrix Products Useful for Statistics Volume 1 - Issue 2
Received: December 17, 2018; Published: December 20, 2018
Corresponding author: Michele Nichelatti, Service of Biostatistics, Fondazione Malattie del Sangue, Milan, Italy
DOI: 10.32474/CTBB.2018.01.000110
Also view in:


Mini Review
In this brief description, we will use the numerator layout [1], and will tacitly assume that all products are conformable.
The derivative of the linear form 𝒰t𝒱 with respect to the vector 𝒱is given as
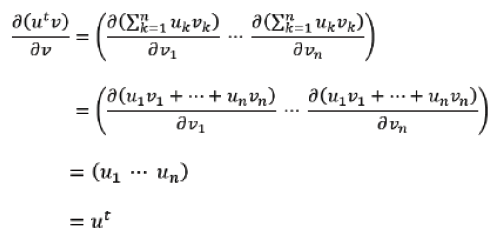
and since 𝒰t𝒱 is a scalar, we are facing a particular case of the derivative of a scalar λ with respect to a vector, e.g., ∂𝒱λ=(∂𝒱1λ ..... ∂𝒱nλ) and it must also be ∂𝒱(𝒰t𝒱)=∂𝒱(𝒱t𝒰) . Moreover, it is easy to demonstrate that using the denominator layout, the derivative would have been ∂𝒱(𝒰t𝒱)=𝒰
If both 𝒰 and 𝒱 vectors are function of a third vector 𝒵, we get
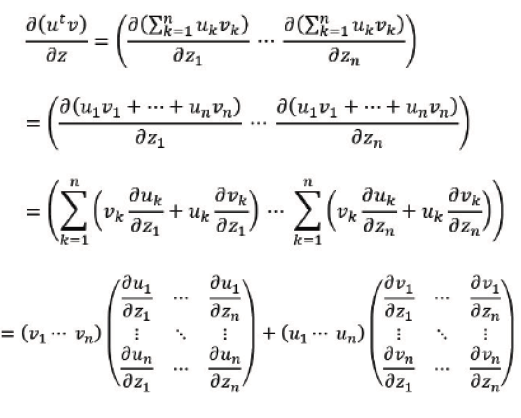
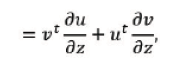
which, in the case 𝒰=𝒱=𝒲 reduces to

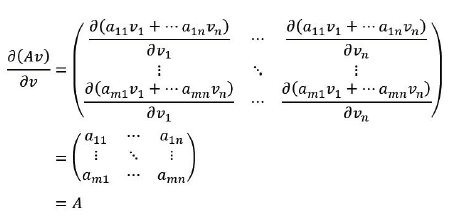
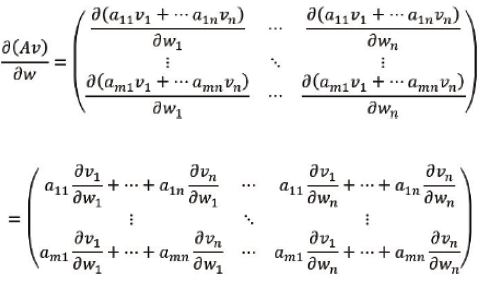
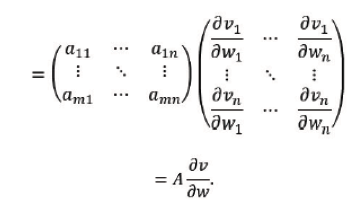
Dealing with a linear transform 𝒰=a𝒱, if A is 𝓂×𝓂 we have
and if 𝒱 is a function of a vector 𝒲𝒱 we get
From definition of bilinear form, we obtain, for 𝒰tA𝒱 the derivative
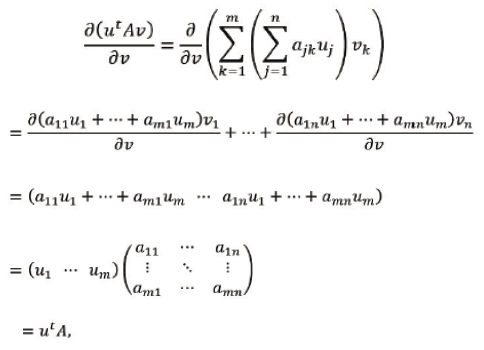
while, for a quadratic form 𝒰tA𝒱(where A is 𝓃 × 𝓃), we get
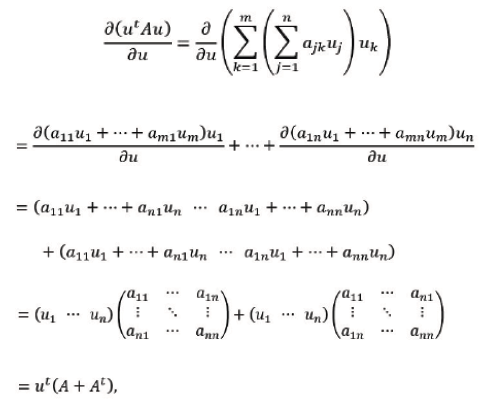
so that, if A is a symmetric matrix, say, for A = XtX, then

References

-

Mark E Smith
Bio chemistry
University of Texas Medical Branch, USA -

Lawrence A Presley
Department of Criminal Justice
Liberty University, USA -

Thomas W Miller
Department of Psychiatry
University of Kentucky, USA -

Gjumrakch Aliev
Department of Medicine
Gally International Biomedical Research & Consulting LLC, USA -

Christopher Bryant
Department of Urbanisation and Agricultural
Montreal university, USA -

Robert William Frare
Oral & Maxillofacial Pathology
New York University, USA -

Rudolph Modesto Navari
Gastroenterology and Hepatology
University of Alabama, UK -

Andrew Hague
Department of Medicine
Universities of Bradford, UK -

George Gregory Buttigieg
Maltese College of Obstetrics and Gynaecology, Europe -

Chen-Hsiung Yeh
Oncology
Circulogene Theranostics, England -
.png)
Emilio Bucio-Carrillo
Radiation Chemistry
National University of Mexico, USA -
.jpg)
Casey J Grenier
Analytical Chemistry
Wentworth Institute of Technology, USA -

Hany Atalah
Minimally Invasive Surgery
Mercer University school of Medicine, USA -

Abu-Hussein Muhamad
Pediatric Dentistry
University of Athens , Greece
